
Programmazione, hacking e sicurezza informatica!
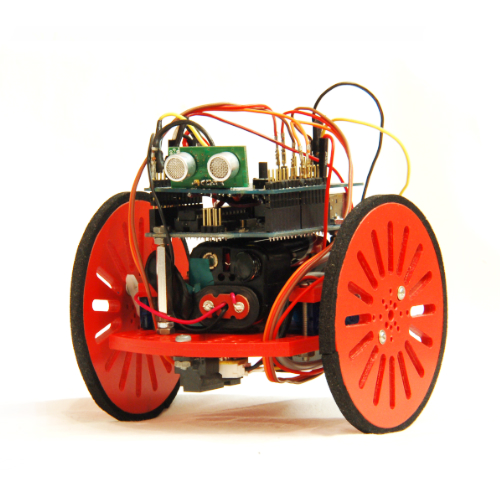
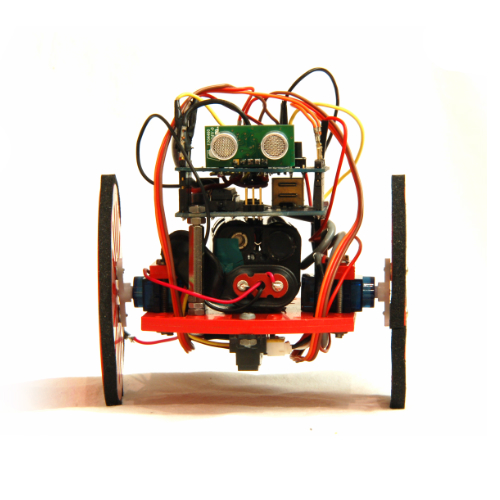
Salve a tutti vi presento un progetto molto carino e accattivante basato, come al solito, su Arduino: è un semplice robot a due ruote, che, invece di avere una terza ruota pivotante per mantenersi in equilibrio, sfrutta un sistema di rivelatori di distanza che gli permettono di restare sempre in piedi nella posizione corretta. Per fare ciò, infatti, impiega due sensori di prossimità (in questo caso Sharp) molto economici, con un range tra i 50 cm e i 3 cm. L’algoritmo che ne permette il funzionamento, infatti, prende in input i valori dei due sensori: se la loro differenza è prossima a 0, allora permette ai due servi di muoversi.
Questa è la prima versione del codice che contiene ancora delle incertezze, infatti se il robot si inclina eccessivamente in avanti o indietro e resta inclinato sul pavimento non è in grado di modificare autonomamente la sua posizione.
Prima versione del codice:
Servo left;
Servo right;
#define servoLeftPin 9
#define servoRightPin 10
#define servoZero 81
#define IRFront 0
#define IRBack 1
#define ledPin 13
int frontSense = 0;
int backSense = 0;
int orientation = 0;
void setup() {
pinMode(ledPin, OUTPUT);
left.attach(servoLeftPin);
right.attach(servoRightPin);
left.write(servoZero);
right.write(servoZero);
Serial.begin(9600);
}
void getOrientation() {
frontSense = 0;
backSense = 0;
orientation = 0;
for (int i = 0; i < 10; i++) {
frontSense = analogRead(IRFront) + frontSense;
backSense = analogRead(IRBack) + backSense;
if (i == 9) {
frontSense = frontSense / 10;
backSense = backSense / 10;
orientation = frontSense - backSense;
}
}
}
void loop() {
getOrientation();
float delta = orientation / 8;
if(delta > 90) delta = 90;
if(delta < -90) delta = -90;
left.write(81 - delta);
right.write(81 + delta);
Serial.println(orientation);
}
Seconda versione del codice che elimina il problema:
Servo left;
Servo right;
#define servoLeftPin 9
#define servoRightPin 10
#define servoZero 81
#define IRFront 0
#define IRBack 1
#define ledPin 13
int frontSense = 0;
int backSense = 0;
int orientation = 0;
int fall = 0;
void setup() {
pinMode(ledPin, OUTPUT);
left.attach(servoLeftPin);
right.attach(servoRightPin);
left.write(servoZero);
right.write(servoZero);
Serial.begin(9600);
}
void getOrientation() {
frontSense = 0;
backSense = 0;
orientation = 0;
for (int i = 0; i < 10; i++) {
frontSense = analogRead(IRFront) + frontSense;
backSense = analogRead(IRBack) + backSense;
if (i == 9) {
frontSense = frontSense / 10;
backSense = backSense / 10;
orientation = frontSense - backSense;
}
}
}
void loop() {
getOrientation();
float delta = orientation / 8;
if(delta > 90) delta = 90;
if(delta < -90) delta = -90;
if(orientation > 250) fall = fall + 1;
if(orientation < -250) fall = fall - 1;
left.write(81 - delta);
right.write(81 + delta);
if (fall == 25 || fall == -25) {
left.write(servoZero);
right.write(servoZero);
delay(250);
fall = 0;
}
Serial.print(orientation);
Serial.print(" ");
Serial.println(fall);
}
Video dimostrazione:
| lun | mar | mer | gio | ven | sab | dom |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 | ||||||
 Bitcoin: 3LfVMZyKmoeyfpnaHnPP4jRwiyyxcz4Wki
Bitcoin: 3LfVMZyKmoeyfpnaHnPP4jRwiyyxcz4Wki
 Ethereum: 0x237913150cFc69c92e8b7efb07E8c8D6F1f2807e
Ethereum: 0x237913150cFc69c92e8b7efb07E8c8D6F1f2807e
 Litecoin: LRrKJ8cn8QJfTP3QZd9brDBUBeVQ4xSwTN
Litecoin: LRrKJ8cn8QJfTP3QZd9brDBUBeVQ4xSwTN
 Tron: TRDJZCYen2ihnYSiyhmPQx6BNMCWBrBs45
Tron: TRDJZCYen2ihnYSiyhmPQx6BNMCWBrBs45
 Dash: XgApW9UF2tVVSe7y2ta12qs5GzSxTSCYcG
Dash: XgApW9UF2tVVSe7y2ta12qs5GzSxTSCYcG
Da anni la tua dose di hacking quotidiana | RSS Feeds

Commenti